For more information on previous VEX games, click here: VEX Past Games
VEX Toss Up 2013-2014
The main purpose of the Toss Up game was to pick up and toss large balls and small balls over a fence into goal zones in order to score points. In order to do that, we had to make a robot that a) could carry both the large and small balls, b) could get over the bump that was placed in the middle of the field, c) had a lift that could place the balls into the tube at the far end of the field, d) could squeeze under the bars in the center of the field, e) high hang at the end of the match, and f) fit the 18" x 18" x 18" size requirement. These were our goals for this competition, goals that we established before we got into designing on paper what our robot would look like. It's important that when designing something for the first time, you establish exactly what you want the finished product to do. This way, you have a clear idea on what needs to be done and what needs to be made.
After we finished drawing out our ideas on paper, which also required us to watch tons of YouTube videos on past Toss Up designs and tournaments, it was time for us, as a team, to build the robot. Since our first VEX experience was at our school club, we could only use the materials that were provided to us by the school and we also had to make sure to share the materials with all our other fellow school teams. Therefore, we had to take into account our limited inventory.
Our first attempts at making the robot were interesting ones to say the least, but every successful attempt we had, regardless of whether or not it would be applicable to our final design, we always had fun testing the equipment and we we built out! We must admit, that year, we might've done more fooling around with the VEX materials than actually building our robot, (which resulted in us having to take it home a couple of times to add the finishing touches) but in the end, we had tons of fun with our fellow team members!
Our first finished robot ended up looking something like this:
After we finished drawing out our ideas on paper, which also required us to watch tons of YouTube videos on past Toss Up designs and tournaments, it was time for us, as a team, to build the robot. Since our first VEX experience was at our school club, we could only use the materials that were provided to us by the school and we also had to make sure to share the materials with all our other fellow school teams. Therefore, we had to take into account our limited inventory.
Our first attempts at making the robot were interesting ones to say the least, but every successful attempt we had, regardless of whether or not it would be applicable to our final design, we always had fun testing the equipment and we we built out! We must admit, that year, we might've done more fooling around with the VEX materials than actually building our robot, (which resulted in us having to take it home a couple of times to add the finishing touches) but in the end, we had tons of fun with our fellow team members!
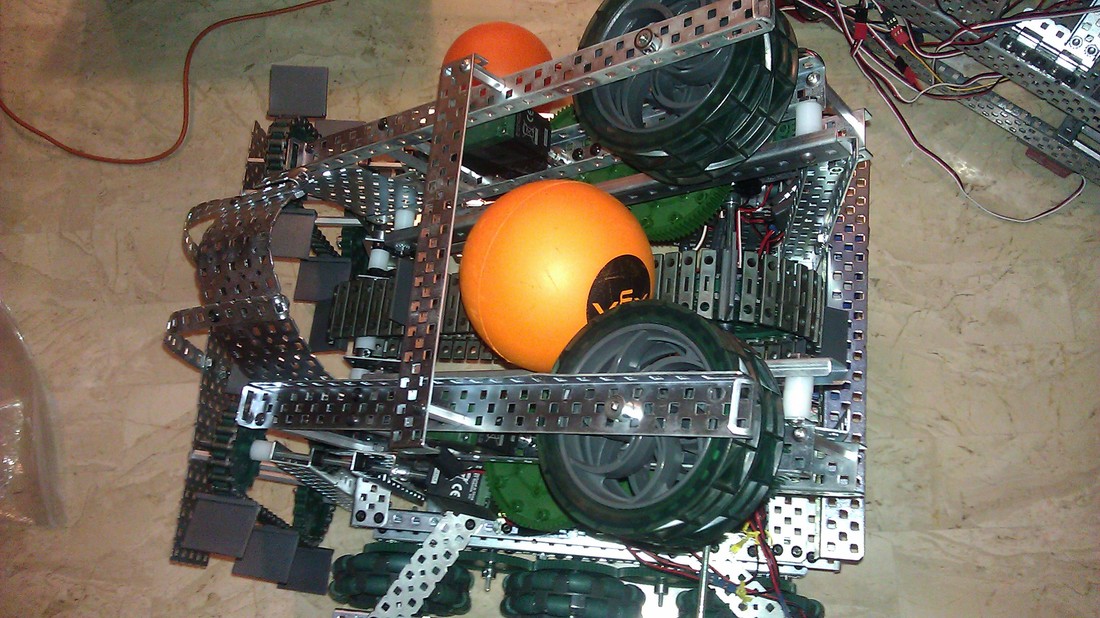
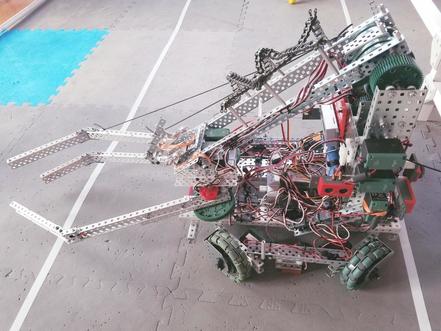
Our first finished robot ended up looking something like this:
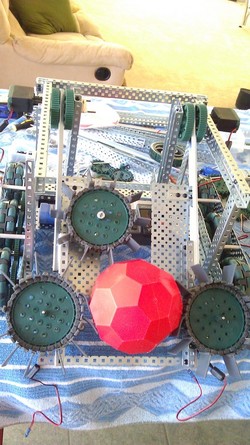
We designed it this way so that the "intake" in the front (that's what we called the system in the front with the circular flipper wheels) would be able to "suck in" the small balls as it moves around the field. The one on the back behind the red small ball was there to stop the ball from falling out from behind the platform as it was lifted up. The lift we used was a simple one: just using two motors in the back to lift up the platform similar to a floor cellar door. The wheels we went with, partially because they were cool, were 6 omni wheels. 3 on each side, powered by a total of 4 motors, 2 on each side. We went with 6 wheels to limit the possibility of getting the robot stuck, like a see-saw, on top of the bump that was located on the field. Overall flaws/cons about our finished robot was the fact that it could only grab one small ball at a time, it couldn't high hang, and during the competition, we weren't able to place not even one small ball in the tube! Despite all of these faults, we were able to go over the bump, knock down a few big balls that were on top of the rail, and shoot out small balls into our goal zone. At the end of the day, we lost some matches and won others, and we didn't win any awards that year, but we did end up getting a ticket to go to the Maryland State Competition!
|
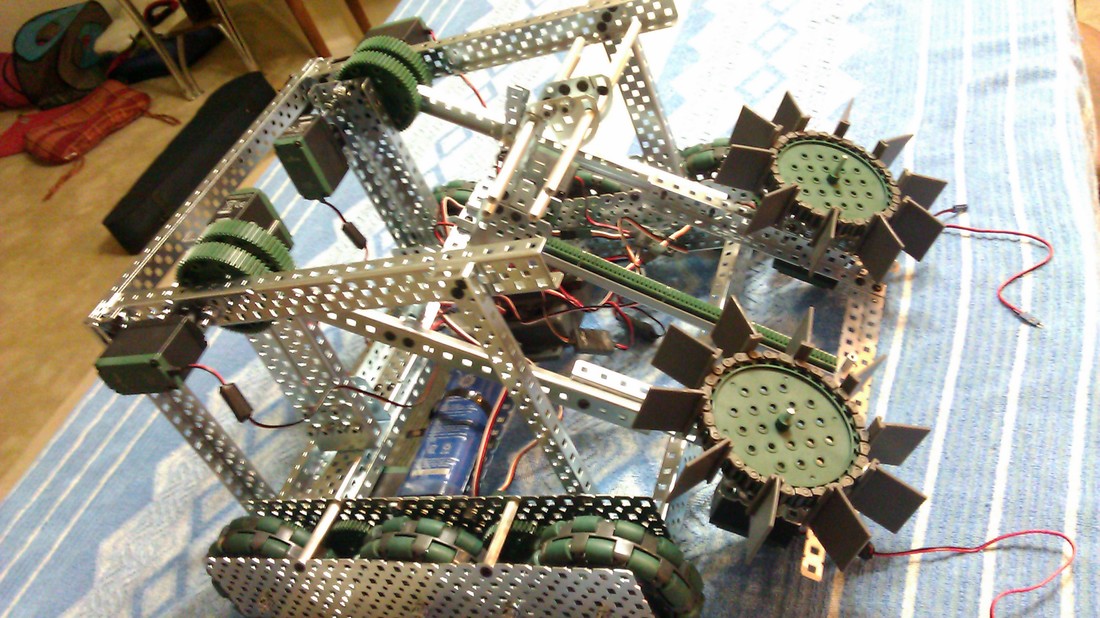
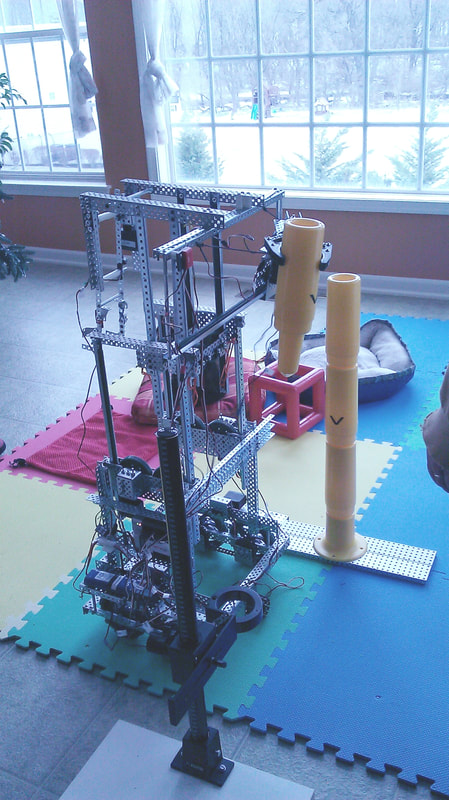
Our State design looked like this. After taking notes on what happened in the county competition, we decided to make some changes to our original design. Our main change was the way the platform operated. Instead of having a flat platform like it did before, we left it open and added a linear motion slide that acted like a pole that could push out the small ball that was collected and hopefully be enough to push it into the tube to score extra points.
|
The end results? All in all, the day of the competition, the robot performed fairly better than it did at the county competition. What was frustrating though, was that even with the new system we came up with to push the balls into the tube, it still didn't work. But, it did grab the attention of some of the judges. :) Overall, our first VEX experience was a fun one, full of ups and downs, but definitely memorable! After this season was over and the next one was announced, we at least had the experience on how to use the VEX materials and we could use the knowledge we gained in Toss Up to our benefit in the next season!
VEX Skyrise 2014-2015
This year was one of our biggest years since we were able to make it all the way to the World Championship, thanks to our Autonomous Skills Challenge points and ranking in Maryland. For this season's challenge, we had to make a robot that was able to pick up cylindrical yellow cones from a cup holder and then place them in a yellow base that was located a little more than a foot away from the cup holder and then stack them up like that, one after the other. Scattered around the field were also cubes that robots could grab and place strategically on poles stationed on the perimeter of the field and/or on the yellow totem pole itself. Last year in Toss Up, we believed that one of the reasons why our robot wasn't able to function as well as we had hoped, was because we focused on making it do too many things at once. That's why in this season, we wanted to focus all our attention on giving our robot a specific purpose. This job that we assigned it was to focus on the building of the yellow totem pole called the Skyrise. One of the reasons why we decided to focus more on the pole than the cubes was because we figured more teams would focus on the cubes and also because it would make for an interesting challenge!
Using our experience working with VEX from last year, we went to work. Because Elizabeth was now a high school student, and Stephanie still in seventh grade, and her school didn't offer a robotics team, Elizabeth decided to become the first solo, all female, self-sponsored VEX team in her county and (we like to believe) in Maryland. This was when the Quantum Harmony BioDragons was born. Stephanie would still be a part of the team at home, but for the most part, she worked on and focused more attention to her school team's robot, leaving Elizabeth to take care of most of the designing and building.
Competing as a self sponsored team had it's challenges but it also had its pros. For example, we could work on the robot any time we wanted since all of the materials were at home, we could order any pieces we needed (as long as our family could afford it), and we could manipulate (ex. cut, bend, alter, etc...) any of the pieces as long as it fit within the VEX rules and regulations.
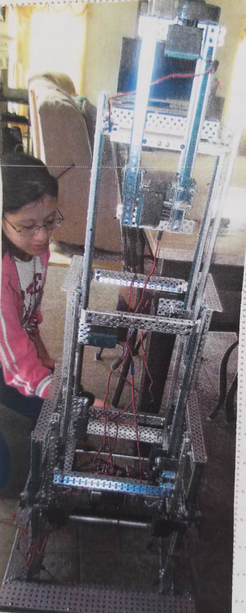
The robot that we used to compete in the local county competition looked like this:
Using our experience working with VEX from last year, we went to work. Because Elizabeth was now a high school student, and Stephanie still in seventh grade, and her school didn't offer a robotics team, Elizabeth decided to become the first solo, all female, self-sponsored VEX team in her county and (we like to believe) in Maryland. This was when the Quantum Harmony BioDragons was born. Stephanie would still be a part of the team at home, but for the most part, she worked on and focused more attention to her school team's robot, leaving Elizabeth to take care of most of the designing and building.
Competing as a self sponsored team had it's challenges but it also had its pros. For example, we could work on the robot any time we wanted since all of the materials were at home, we could order any pieces we needed (as long as our family could afford it), and we could manipulate (ex. cut, bend, alter, etc...) any of the pieces as long as it fit within the VEX rules and regulations.
The robot that we used to compete in the local county competition looked like this:
|
Basically the way it was structured, the whole robot lifted up like a wedding/layered cake, which is how we described it as, with a large outer layer and then smaller and smaller inner layers that snugly fit inside it. The claw/arm had two joints, on at the elbow and one at the wrist, where it could move up and down to put the cones in place. An added benefit we had in using the claw was that we were also able to pick up cubes to a certain point. In order to reach a height of 5 stacked cones, we added an extra layer inside, a total of 4 layers, in the form of a differential with a turntable on top. One of the things we made sure to implement in our design was the fact that our robot didn't have to move a single bit as it was building the Skyrise tower. The whole time, the robot is stationary, only repeating a set of actions like if it would be a factory robot. This increased accuracy and saved time in the long run. It also helped when programming the robot for the Autonomous Skills Challenge, which is something we took more seriously that year than we did in the Toss Up season. Basically all the robot did in the Autonomous Challenge was build the Skyrise tower until the time ran up. It was in our county competition that our robot won the Design Award and earned a spot in the Maryland State Competition.
|
|
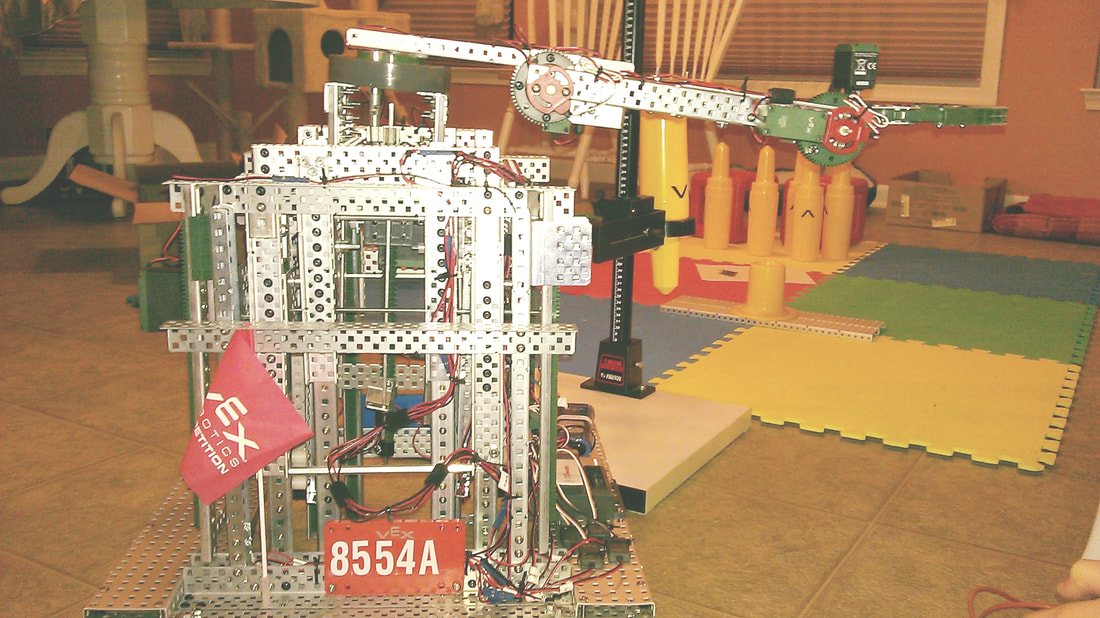
For the Maryland State competition, this was how the robot looked like. We decided to change the arm system because it was evident in the county competition that it was way too complex to control and program as it had two different joints that needed to be synchronized and that ate up too much of the actual competition time to get it in exactly the right position. So, it was changed to a kind of linear sliding claw. It was faster, more efficient, more accurate, and it was way easier to program compared to what we had before. It was also lighter on the structure, since we took away the differential and turntable, which at this point weighed nearly 20 pounds! It was a definite improvement. We also decided to add another mechanism on the back: a kind of hook that was attached to a worm gear for strength that allowed us to pick up the cubes with better grip. We also added gearboxes with more worm gears and attached them to the gears that were lifting up the outer layer since without them, the structure started getting stuck and falling back down whenever we lifted up the lift. At the State competition, we performed fairly well! Although we didn't make to the finals, we did score high in the Autonomous Challenge! Despite this, though, Elizabeth's dad didn't think that we would be able to advance to the World competition. However, Elizabeth insisted that she and her dad stay to here the results, and sure enough, our ranking in the Skills Challenge was high enough that we scored our first ticket to the World Championships! You can imagine how excited she and her dad were to tell the news to Stephanie and their mom at home!
|

Elizabeth talking to a judge about her robot at the World Championship with her father.
|
Our design for the World Championship didn't vary that much from the State design. One of the main differences was that we changed the linear sliding head from using linear gears to a chain and sprockets for smoother and faster travel. We also wanted the lift to be faster and more efficient, so we kept the motors in the outer layer, but took away the other motors in the inner layers and then connected them together with rope. This way, the whole thing becomes one system.
|
Overall, being able to participate in the World Championship was truly a wonderful opportunity and irreplaceable experience! It was so amazing to see all of the other designs from the international teams and listen to their though processes! It was also our first time as a family traveling so far in the US to another state (the competition was held in Louisville, Kentucky)! We both learned so much and had such a great time!
VEX Nothing But Net 2015-2016
The Nothing but Net game was probably our most challenging year in terms of time and game. To score points, the robot had to pick up and shoot small Styrofoam balls into a triangular net located on the other side of the field, as well as be able to elevate your alliance member's robot to score extra points. So the robot needed to be designed to hold three balls at once, have enough power to push the balls into the 36" tall goal about three feet away, be able to pick up our alliance members robot, and fit inside the 18" by 18" by 18" restrictions. Now this sounds easy in theory, after all you just have to pick up the balls and shoot it into the goal right? Wrong. When we first started we thought this exact same thing. However we quickly realized that doing the same thing consistently for a robot was VERY hard. There were multiple variables that effected the trajectory and power of the ball every single time the robot shot a ball. This was our main challenge as we plowed through this years game.
As a graduating middle school student in the eighth grade, Stephanie still had a lot of things to accomplish before starting her first year of high school, and of course that meant leading and directing her Robotics Club team. However Stephanie decided to work harder and equally work on the self-sponsored team, Quantum Harmony Bio-Dragons. Now joining in as the main programmer of the team, Elizabeth and Stephanie worked after hours at home to complete and perfect the robot for the Nothing but Net VEX 2015-2016 game.
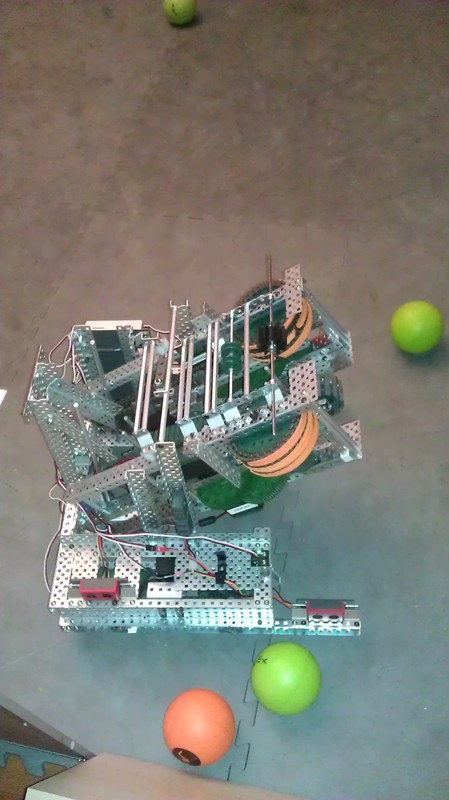
.This is what the robot looked like in the first stages of designing.
|
This year we mainly focused on the shooters and making the system mostly autonomous. The theory was that if one ball could make it into the top net, and no one changed any variables, then all the balls that followed would follow the same trajectory. The shooting system consisted of two rubber regular wheels spinning in opposite directions to provide the thrust needed to launch the balls into the nets. Then on the base where the balls would be located, we had a conveyor belt that would carry the balls all the way into the shooting system to be launched. The whole robot followed a repeated system of prep, carry, and shoot. On the base of the robot we had three wheels connected by a string of gears and one motor on each side. We had decided that the best plan of action was to stay where we were and launch the objects from that space. After all, the starting grid was the optimal place to start launching from.
|
|
This is the final product of our robot. We replace the rubber wheels, for two sprocket gears coated in rubber bands. This was better because it provided more traction between rubber ball and shooter and thus provided the most thrust. However the down side to this was that the rubber bands could at some points randomly break apart. This meant that we would have to replace them or else there would be another variable that might affect the way the ball was shot.
The main problem we had was the battery level. You would be surprised how much just one percent less battery effected the robot and how it launched each ball. What happened was that the battery would die too quickly and therefore the motors would lose power. No matter how fast the gears were spinning they wouldn't be able to spin if there was no power. We tried connecting a second battery and the extra 9 volt battery, but the problem didn't seem to be getting any better. We had probably spent twice as many nights awake than any year before. However we plowed through and did out best with what we built and knew. |
This year was also different in the sense that we had no time to actually participate in the States competition. On the exact same day, Stephanie had an All States Math competition, which she unfortunately could not attend and sacrificed for this competition, and both Elizabeth and Stephanie has a All County Orchestra rehearsal and concert were they were both concert masters that year. In the last final matches of the States competition, both Elizabeth and Stephanie were not present, and instead in their place were two very good friends that volunteered to be there in there place.

VEX Starstruck 2016-2017
The main purpose of the Starstruck game was to pick up oddly shaped "stars" and cubes and throw them over a large fence to score points depending on far the item was launched on the other side. To do that we had to, build a robot that could 1.) carry multiple stars at the same time, 2.) be able to pick up both stars and cubes, 3.) have enough power to throw both objects over and across the fence, 4.) to this process quickly and efficiently, 5.) be able to fit within the 18" by 18" by 18" requirement, and 6.) be able to high hang at the end of the match. Like the past four years, these were the ideas we established and discussed as goals for the upcoming robot. You could get a general idea of what your robot needs to accomplish from the introduction VEX game video, however it's important to sit down with the other members of your team and discuss what are essential goals that you need to accomplish.
After establishing our rudimentary goals for this year, we started automatically thinking of different parts that may or may not be helpful when concerning the strategies of this years game. Would weight play a major factor of this years game? How about height? If so, what type of lift would be better to accomplish our task? Do we need to be fast, or is power a more important factor? All these questions play a major role in determining what the final robot will look like. If the last three years have taught us anything, it's that establishing a solid base is just as important as building the actual robot.
Talking about bases, the first step to any good robot is the base. The types of wheels or the shape of the base are all important factors that may determine whether or not the robot moves at all. The base, we decided, was a hexagonal shape with four wheels on each diagonal side. The wheels we used were all omni-wheels, so that the robot could turn easier than that of regular wheels. The hexagonal shape is able to contain more area without increasing the perimeter and when using a hexagonal base with omni wheels you are able to maneuver the robot from side to side.
|
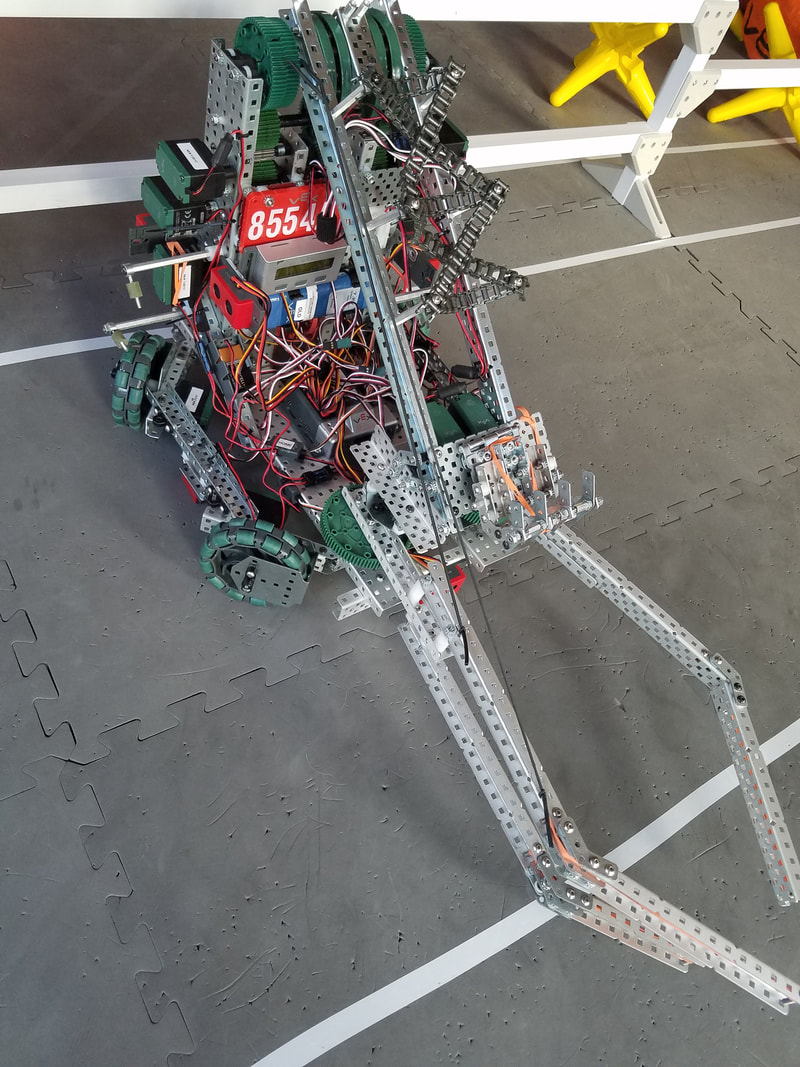
This is what the final product looked like. When the claws were retracted, it was barley just able to fit within the 18" by 18" by 18" restrictions. The long claws were perfect for grabbing multiple stars and the 12.5" cube. The unique three armed claw was better at grabbing the oddly shaped stars no matter what position they were in. On the back we had a simple lift with three motors on each side for maximum power. After all with the weight of the stars, cubes, and the actual, everything was pretty heavy for the robot to handle. However we solved that problem by changing the gear ratio to fully make use of the extra power it provided. The chain on the top of the arm of the lift was a cushion so that the impact of the arm slamming against the fence would be lessened and the arm supported. Later on at States we changed these chains to a diamond shaped support made up off various small pieces.
Also you may not see it from the way the pictures are angled, but on the back of the robot were multiple rubber bands connecting from the arm of the lift to the base of the robot. This was an important design detail, because without these rubber bands helping to support the weight of both scoring objects, arm, and claw we wouldn't be able to lift the arm as fast as we could. There were on multiple occasions that the rubber bands would fall off because of the lift going to far backwards, but this was just another challenge for the driver to think about as she was driving the robot. |
|
At the last 30 seconds of a match, teams are allowed the option to high hang from a 30" high vertical PVC pipe located in the corner of your alliance's field. Our robot was able to do this, although admittedly not all the time. The difficult part was figuring out a mechanism that was able to support the 14 pounds that was our robot, while not using any motors. What we came up with was a flexible hook that grabbed onto the edges of the pipes opening and used the power of the lift to pull to robot up. However even with the modifications we made to the robot to support this design, the motors were just not strong enough to lift up the entire robot 100% of the time. Fortunately about 60% of the time the lift was able to pull itself up in the last minute and score those few necessary points needed to win a match.
|
What happened at the end of the county competition was a huge surprise. We as a team have usually never been good at the driving part of the competition. Our main focuses were mainly programming skills and the autonomous period. So when this years game announced how it was combining both autonomous and driving skills points when determining who goes to States, we were devastated. As a team who always excelled in programming, this change made it seem as though we went back in time to our first year of VEX. So you can imagine our surprise when we made it all the way to the Semi-finals with the little experience with driving we had. Stephanie, who was our driver, was driving the robot for the first time with only a couple of hours of practice prior to the tournament, while Elizabeth was right there by her side giving her verbal support and giving advice to what the best plan of action may be.
In a suspenseful match between teams who ranked second and fifth during the regular matches, we had come out as the victors by two points. We were honestly so surprised and overjoyed, that even though we didn't manage to win first place, we've never been happier. Later on we were awarded the Design Award as well as a ticket to States. Even though we didn't get to place first, it was the most exciting competition we had ever played in.
In a suspenseful match between teams who ranked second and fifth during the regular matches, we had come out as the victors by two points. We were honestly so surprised and overjoyed, that even though we didn't manage to win first place, we've never been happier. Later on we were awarded the Design Award as well as a ticket to States. Even though we didn't get to place first, it was the most exciting competition we had ever played in.